LMStudio APIを試す|Go言語でローカルLLMを呼び出す方法
Aru
Aru's テクログ(Aruaru0)
LKH-3は、巡回セールスマン問題(TSP)の近似解を高速に求める強力なソルバーです。しかしながら、ドキュメントファイルは用意されているものの、具体的な使用方法は詳しく説明されていないため、初めて使う人にとっては分かりにくい面があります。本記事では、LKH-3を初めて触る人向けに、インストールから基本的な使い方を実際にTSP問題の設定ファイルを例に解説します。
K. HelsgaunによるLin-Kernighan-Helsgaun法(LKH法)の実装です。LKH法は、有名な巡回セールスマン問題(TSP、Travelling Salesman Problem)を解くアルゴリズムで、これをソフトウェアとして実装したものになります。
巡回セールスマン問題は、セールスマンが複数の都市を巡回して最短距離で一度ずつ訪問し、出発点に戻るための最適なルートを求めるという問題です。計算機科学や最適化問題の分野で非常に有名な問題で、この問題のソルバーは生産計画、配送計画などに応用できます。
ホームページを見ると、Version 3.0.9(June 2023)となっており、現在も更新されていることがわかります。
LKH-3のホームページ
http://webhotel4.ruc.dk/~keld/research/LKH-3/
ライセンスについて
ホームページの最後の方に、以下のように書かれています。
“The code is distributed for academic and non-commercial use. The author reserves all rights to the code.”
学術と商用利用以外で利用可能(商用利用不可)ということです。

公式に書かれているわけではありませんが、実際に使用した上での特徴になります。
巡回セールスマンのソルバーとして高速です。Googleが開発しているOR-Toolsなどと比較しても高速に近次解を求めることができます。高速だからといって、解の精度が低いわけでもありません。
慣れるまで、若干使いにくいですが、高速性はかなり魅力です
訪問先が数千を超える大規模な問題にも対応できます(実際に使用実績あり)。思った以上に大規模な問題にも適用できたので、驚いています。
kaggleで使うこともあります。
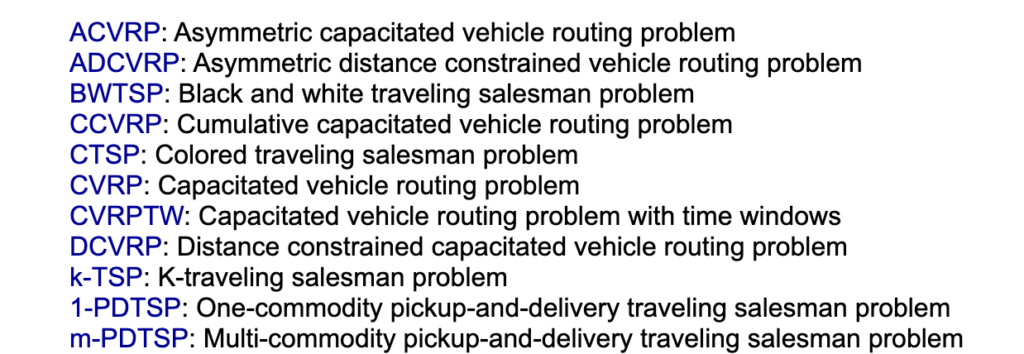
単純なTSPだけでなく、TSPの派生問題を解くことができます。以下は公式ページに記載されている問題の一覧ですが、並べると非常に多くの種類があることが分かります。
知らないものも多いです
今回は、基本的なTSPについて使い方を解説します。
| TSP | Symmetric traveling salesman problem(巡回セールスマン問題) |
| ASTP | Asymmetric traveling salesman problem(非対称循環セールスマン問題) |
| HCP | Hamiltonian cycle problem(ハミルトンサイクル問題) |
| HPP | Hamiltonian path problem(ハミルトンパス問題) |
| ACVRP | Asymmetric capacitated vehicle routing problem(非対称容量制約付き配送計画問題) |
| ADCVRP | Asymmetric distance constrained vehicle routing problem(非対称距離制約付き配送計画問題) |
| BWTSP | Black and white traveling salesman problem (白黒巡回セールスマン問題;点に白と黒の属性を付加して,連続する黒の点の長さや位数に対する制約が付加された問題) |
| CCVRP | Cumulative capacitated vehicle routing problem(累積容量制約付き配送計画問題;各顧客への到着時刻の和を最小化する問題) |
| CTSP | Colored traveling salesman problem(色付き巡回セールスマン問題;複数のセールスマンは色をもち,訪問する点は色の部分集合をもつ. 点は指定したいずれかの色をもつセールスマンによって処理されるという条件が付加された問題) |
| CVRP | Capacitated vehicle routing problem(容量制約付き配送計画問題) |
| CVRPTW | Capacitated vehicle routing problem with time windows(時間枠付き容量制約付き配送計画問題) |
| DCVRP | Distance constrained capacitated vehicle routing problem(距離・容量制約付き配送計画問題) |
| 1-PDTSP | One-commodity pickup-and-delivery traveling salesman problem(1品種・積み込み・積み降ろし巡回セールスマン問題) |
| m-PDTSP | Multi-commodity pickup-and-delivery traveling salesman problem(複数品種・積み込み・積み降ろし巡回セールスマン問題) |
| m1-PDTSP | Multi-commodity one-to-one pickup-and-delivery traveling salesman problem (複数品種・1対1・積み込み・積み降ろし巡回セールスマン問題) |
| MLP | Minimum latency problem(最小待ち時間問題;顧客の待ち時間の和を最小化する巡回セールスマン問題) |
| MTRP | Multiple traveling repairman problem(複数巡回修理人問題;複数の修理人が顧客を訪問する際の,顧客の待ち時間の和を最小化する問題) |
| MTRPD | Multiple traveling repairman problem with distance constraints(距離制約付き複数巡回セールスマン問題) |
| mTSP | Multiple traveling salesmen problem(複数巡回セールスマン問題) |
| OCMTSP | Open close multiple traveling salesman problem(パス型閉路型混在巡回セールスマン問題;あるセールスマンはデポに戻り,他のセーするマンはデポに戻る必要がないパスで良いと仮定した問題) |
| OVRP | Open close multiple traveling salesman problem(パス型閉路型混在巡回セールスマン問題;あるセールスマンはデポに戻り,他のセーするマンはデポに戻る必要がないパスで良いと仮定した問題) |
| OVRP | Open vehicle routing problem(パス型配送計画問題;デポに戻る必要がないと仮定した配送計画問題) |
| PDPTW | Pickup-and-delivery problem with time windows(時間枠付き積み込み・積み降ろし型配送計画問題) |
| PDTSP | Pickup-and-delivery traveling salesman problem(積み込み・積み降ろし巡回セールスマン問題) |
| PDTSPF | Pickup-and-delivery traveling salesman problem with FIFO loading(先入れ先出し型積み込み・積み降ろし巡回セールスマン問題) |
| PDTSPL | Pickup-and-delivery traveling salesman problem with LIFO loading(後入れ先出し型積み込み・積み降ろし巡回セールスマン問題) |
| RCTVRP | Risk-constrained cash-in-transit vehicle routing problem(リスク制約付き現金輸送配送計画問題) |
| RCTVRPTW | Risk-constrained cash-in-transit vehicle routing with time windows(時間枠付きリスク制約付き現金輸送配送計画問題) |
| SOP | Sequential ordering problem(先行制約付き巡回セールスマン問題) |
| STTSP | Steiner traveling salesman problem(Steinr巡回セールスマン問題) |
| TRP | Traveling repairman problem(巡回修理人問題;顧客の待ち時間の和を最小化する問題) |
| TSPDL | Traveling salesman problem with draft limits(喫水制限付き巡回セールスマン問題) |
| TSPPD | Traveling salesman problem with pickups and deliveries(喫水制限付き積み込み・積み降ろし巡回セールスマン問題) |
| TSPTW | Traveling salesman problem with time windows(時間枠付き巡回セールスマン問題) |
| VRPB | Vehicle routing problem with backhauls(帰り荷を考慮した配送計画問題) |
| VRPBTW | Vehicle routing problem with backhauls and time windows(帰り荷を考慮した時間枠付き配送計画問題) |
| VRPMPD | Vehicle routing problem with mixed pickup and delivery(配送と集荷を考慮した配送計画問題) |
| VRPMPDTW | Vehicle routing problem with mixed pickup and delivery and time windows(配送と集荷を考慮した時間枠付き配送計画問題) |
| VRPSPD | Vehicle routing problem with simultaneous pickup and delivery(同時配送集荷を考慮した配送計画問題) |
| VRPSPDTW | Vehicle routing problem with simultaneous pickup-delivery and time windows(同時配送集荷を考慮した時間枠付き配送計画問題) |
LKH-3は、ダウンロード後にコンパイルしなければなりません。
C/C++の開発環境が必要となりますので、まずばC/C++の開発環境を用意する必要があります。各プラットフォーム(windows/macOS/linux)での開発環境の構築については、ここでは説明しません(windowsは実行ファイルが存在しますので開発環境は必要ありません)。
その後、LKH-3.0.9.tgzをダウンロードします。Windowsの場合は、実行ファイルがこちらからダウンロード可能です。
ダウンロードしたら、以下のコマンドを使って.tgzファイルを展開します。
% tar xxvf LKH-3.0.9.tgz展開されたディレクトリに移動して、makeコマンドを実行します。
% cd LKH-3.0.9
% makeエラーが出なければLKHというファイルが生成されているはずです。
% ls
DOC LKH Makefile README.txt SRC pr2392.par pr2392.tsp whizzkids96.atsp whizzkids96.par正常に動作するか確認します。以下のコマンドを実行してください。
% ./LKH whizzkids96.par正常にインストールされていれば以下のような実行結果が出力されます。
:
(略)
:
* 40: Cost = 1244_4933, Gap = 5.1564%, Time = 0.37 sec.
* 57: Cost = 1244_4899, Gap = 5.1564%, Time = 0.54 sec.
* 84: Cost = 1244_4823, Gap = 5.1564%, Time = 0.75 sec.
* 92: Cost = 1244_4797, Gap = 5.1564%, Time = 0.77 sec.
* 96: Cost = 1238_4882, Gap = 4.6492%, Time = 0.80 sec.
* 109: Cost = 1238_4872, Gap = 4.6492%, Time = 0.87 sec.
* 134: Cost = 1198_4748, Gap = 1.2680%, Time = 0.99 sec.
* 139: Cost = 1198_4738, Gap = 1.2680%, Time = 1.01 sec.
* 154: Cost = 1198_4724, Gap = 1.2680%, Time = 1.12 sec.
* 331: Cost = 1198_4708, Gap = 1.2680%, Time = 2.08 sec.
* 2272: Cost = 1197_4750, Gap = 1.1834%, Time = 12.81 sec.
* 2275: Cost = 1193_4746, Gap = 0.8453%, Time = 12.83 sec.
* 2340: Cost = 1191_4744, Gap = 0.6762%, Time = 13.21 sec.
* 2411: Cost = 1183_4715, Gap = 0.0000%, Time = 13.73 sec.
Population:
1: 1183_4715, Gap = 0.0000%
Run 1: Cost = 1183_4715, Gap = 0.0000%, Time = 13.73 sec.
Successes/Runs = 1/1
Penalty.min = 1183, Penalty.avg = 1183.00, Penalty.max = 1183
Gap.min = 0.0000%, Gap.avg = 0.0000%, Gap.max = 0.0000%
Trials.min = 2411, Trials.avg = 2411.0, Trials.max = 2411
Time.min = 13.73 sec., Time.avg = 13.73 sec., Time.max = 13.73 sec.
Time.total = 13.79 sec.
Size.min = 28, Size.max = 33, Penalty = 1183
Cost.min = 1173, Cost.max = 1183, Cost.sum = 4715
Best ATSP solution:
Cost = 1183_4715LKHで巡回セールスマン問題を解く場合、パラメータファイルをプロブレムファイルを作成する必要があります。
パラメータファイルの詳しい説明は、LKHのdocフォルダにあります。
doc/LKH-2_USER_GUIDE.pdfdoc/LKH-3_PARAMETERS.pdfまた、プロブレムファイルはTSPLIBと共通のようです。
LKHのドキュメントにリンク先が書かれていますが、そのリンク先には現在プロブレムファイルのフォーマットのドキュメントがないみたいです。調べたところ、以下にありましたので、そちらを参照してください。
プロブレムファイルのフォーマットのドキュメント
http://comopt.ifi.uni-heidelberg.de/software/TSPLIB95/tsp95.pdf
パラメータ一覧は、LKH起動時に表示されます。
下記は、whizzkids96.parを実行した時に表示されるパラメータです。
これをコピペして、パラメータの意味を調べながら書き換えても良いですし、付属のpr2392.parやwhizzkids96.parをベースに編集しても良いと思います。
パラメータの説明は省略します。自分も基本は、まずは動かしてみて、あとはドキュメントを見ながら必要そうなものを追加している感じで使っています。
PARAMETER_FILE = whizzkids96.par
Reading PROBLEM_FILE: "whizzkids96.atsp" ... done
ASCENT_CANDIDATES = 50
BACKBONE_TRIALS = 0
BACKTRACKING = NO
# BWTSP =
# CANDIDATE_FILE =
CANDIDATE_SET_TYPE = ALPHA
# DISTANCE =
DEPOT = 1
# EDGE_FILE =
EXCESS = 0.0322581
EXTERNAL_SALESMEN = 0
EXTRA_CANDIDATES = 0
EXTRA_CANDIDATE_SET_TYPE = QUADRANT
GAIN23 = NO
GAIN_CRITERION = YES
INITIAL_PERIOD = 124
INITIAL_STEP_SIZE = 1
INITIAL_TOUR_ALGORITHM = WALK
# INITIAL_TOUR_FILE =
INITIAL_TOUR_FRACTION = 1.000
# INPUT_TOUR_FILE =
K = 0
KICK_TYPE = 4
KICKS = 1
# MAX_BREADTH =
MAKESPAN = NO
MAX_CANDIDATES = 6
MAX_SWAPS = 0
MAX_TRIALS = 10000
# MERGE_TOUR_FILE =
MOVE_TYPE = 5 SPECIAL
MTSP_MIN_SIZE = 1
MTSP_MAX_SIZE = 247
MTSP_OBJECTIVE = MINMAX
# MTSP_SOLUTION_FILE =
# NONSEQUENTIAL_MOVE_TYPE = 5
OPTIMUM = 1183
# OUTPUT_TOUR_FILE =
PATCHING_A = 1
PATCHING_C = 0
# PI_FILE =
POPMUSIC_INITIAL_TOUR = NO
POPMUSIC_MAX_NEIGHBORS = 5
POPMUSIC_SAMPLE_SIZE = 10
POPMUSIC_SOLUTIONS = 50
POPMUSIC_TRIALS = 1
POPULATION_SIZE = 10
PRECISION = 100
PROBLEM_FILE = whizzkids96.atsp
RECOMBINATION = IPT
RESTRICTED_SEARCH = YES
RUNS = 1
SALESMEN = 4
SCALE = 1
SEED = 1
# SINTEF_SOLUTION_FILE =
STOP_AT_OPTIMUM = YES
SUBGRADIENT = YES
# SUBPROBLEM_SIZE =
# SUBPROBLEM_TOUR_FILE =
SUBSEQUENT_MOVE_TYPE = 5 SPECIAL
SUBSEQUENT_PATCHING = YES
# TIME_LIMIT =
# TOTAL_TIME_LIMIT =
# TOUR_FILE =
TRACE_LEVEL = 1
VEHICLES = 4この記事では、2つの記述パターンでプロブレムファイルの書き方を例示しますが、プロブレムファイルの書き方はサンプルを見ながら学習するのが良いと思います。
公式ページでは、それぞれの問題名がリンクになっていて、それぞれサンプルファイルをダウンロードすることができます。そちらを見ながら、書き方を確認するのが一番早いです。
2次元のマス目上に、点が配置されている場合は、各点の座標を設定したプロブレムファイルを作成します。例えば、下図のように6つの点が指定されている場合、プロブレムファイルは以下のようになります。
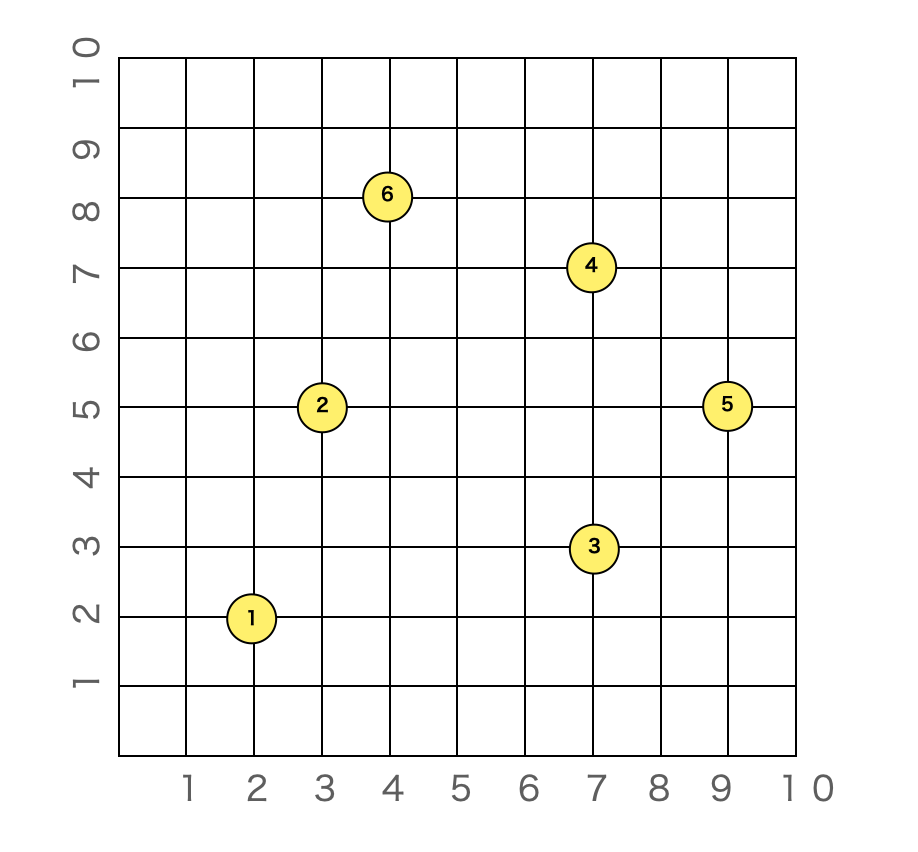
パラメータの説明です。
DIMENSIONは点の数です。EDGE_WEIGHT_TYPEは辺の重みのタイプを指定するもので、2次元の距離なので、EUC_2Dとなります。
最後のNODE_COORD_SECTIONがそれぞれの点の座標で、(点の番号、x座標、y座標)の組みを並べます。
NAME : test001
COMMENT : test001 tsp
TYPE : TSP
DIMENSION : 6
EDGE_WEIGHT_TYPE : EUC_2D
NODE_COORD_SECTION
1 2 2
2 3 5
3 7 3
4 7 7
5 9 5
6 4 6
EOF次に、パラメータファイルを作成します。とりあえず、pr2392.parをコピーして、必要ない部分をカットし、OUTPUT_TOUR_FILEを追加しました。
OUTPUT_TOUR_FILEを指定しないと結果が出力されません
PROBLEM_FILE = test.tsp
OUTPUT_TOUR_FILE = result.txt
MOVE_TYPE = 5
PATCHING_C = 3
PATCHING_A = 2
RUNS = 10./LKH test.parで実行すると以下のresult.txtが出力されます。
NAME : test001.18.tour
COMMENT : Length = 18
COMMENT : Found by LKH-3 [Keld Helsgaun] Fri Dec 8 14:25:53 2023
TYPE : TOUR
DIMENSION : 6
TOUR_SECTION
1
2
6
4
5
3
-1
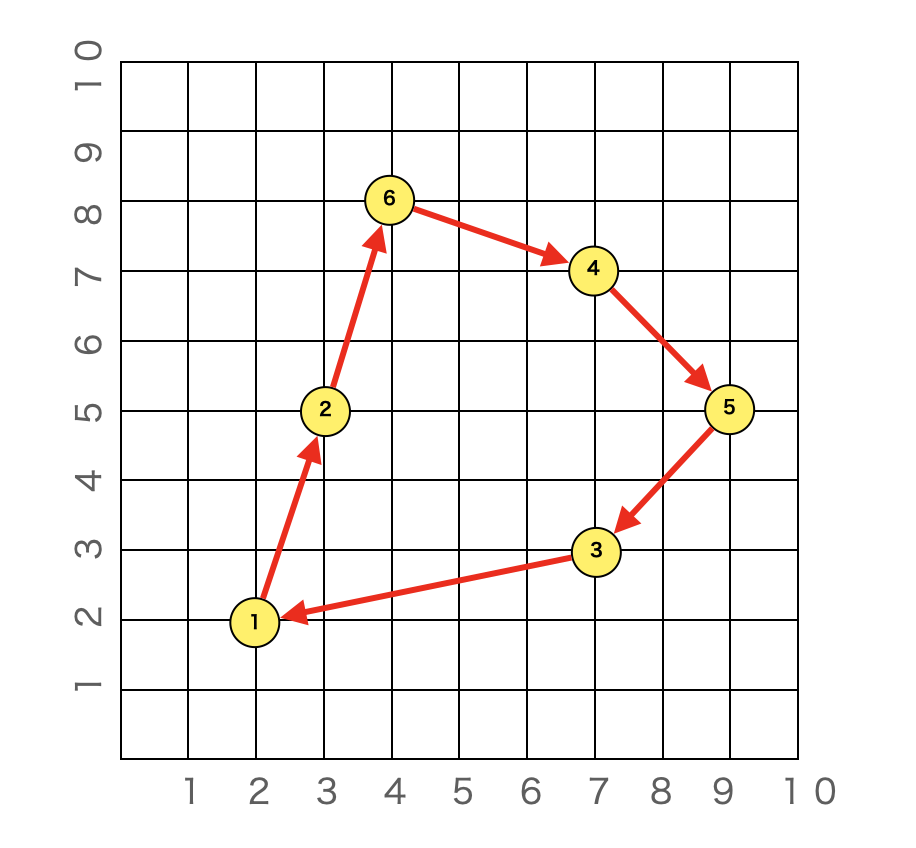
EOFLength=18なので、距離が18のルートを見つけたようです。TOUR-SECTIONが巡回経路で、これを図示すると以下のようになります。
2D上にマップできない問題などは、マトリクスで入力します。ここでは、以下の図の問題を例に説明します。
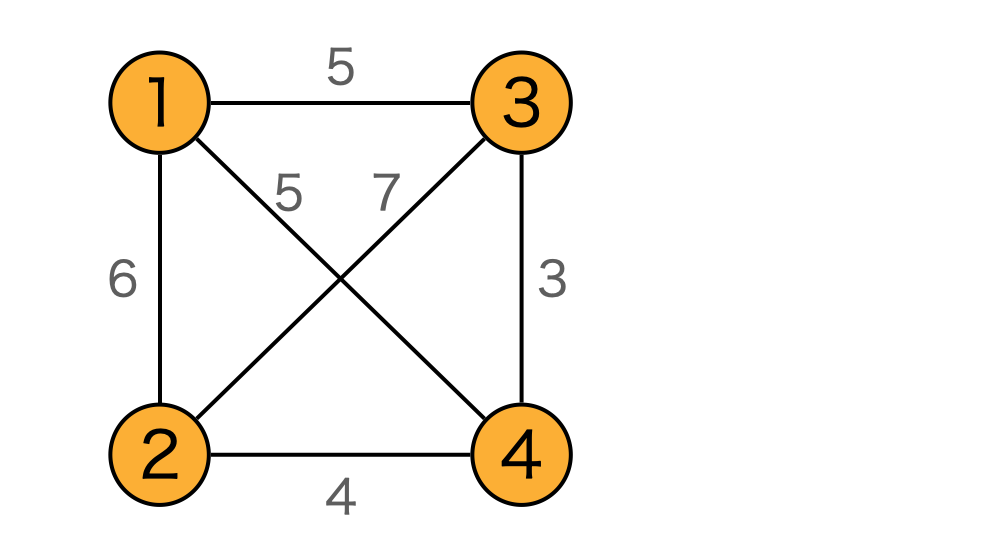
これを、表にすると以下のようになります。
一行目は、1から1、2、3、4への距離が0、6、5、5であることを表しています。
このような感じで全ての点から点への距離を表にします。
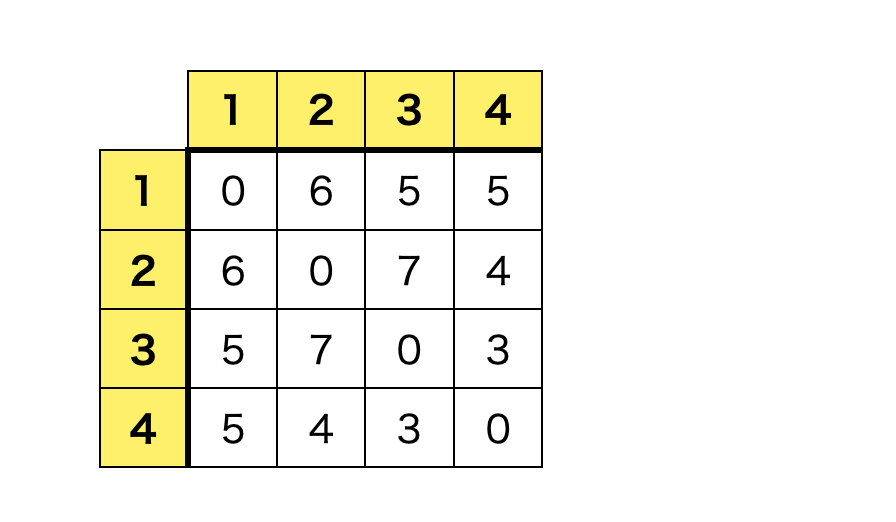
これをプロブレムファイルにすると以下のようになります。
EDGE_WEIGHT_TYPEにEXPLICITを、EDGE_WEIGHT_FORMATにFULL_MATRIXを設定し、EDGE_WEIGHT_SECTIONに、上の表の値を書きます(最後にEOFを入れるのを忘れないように)
点の数が1000などになると、EDGE_WEIGHT_SECTIONがかなり大きくなります。ファイルをプログラムで生成させるなどの工夫をした方がよいです(1000×1000のマトリクスを手動で埋めるのは現実的ではないです)。

ファイルサイズが大きくなって読み込めないかと心配しましたが、数千までは読み込み、実行ができました。
NAME : test002
TYPE : TSP
DIMENSION : 4
EDGE_WEIGHT_TYPE: EXPLICIT
EDGE_WEIGHT_FORMAT: FULL_MATRIX
EDGE_WEIGHT_SECTION
0 6 5 5
6 0 7 4
5 7 0 3
5 4 3 0
EOFパラメータファイルも用意します。
PROBLEM_FILE = test2.tsp
OUTPUT_TOUR_FILE = result2.txt
MOVE_TYPE = 5
PATCHING_C = 3
PATCHING_A = 2
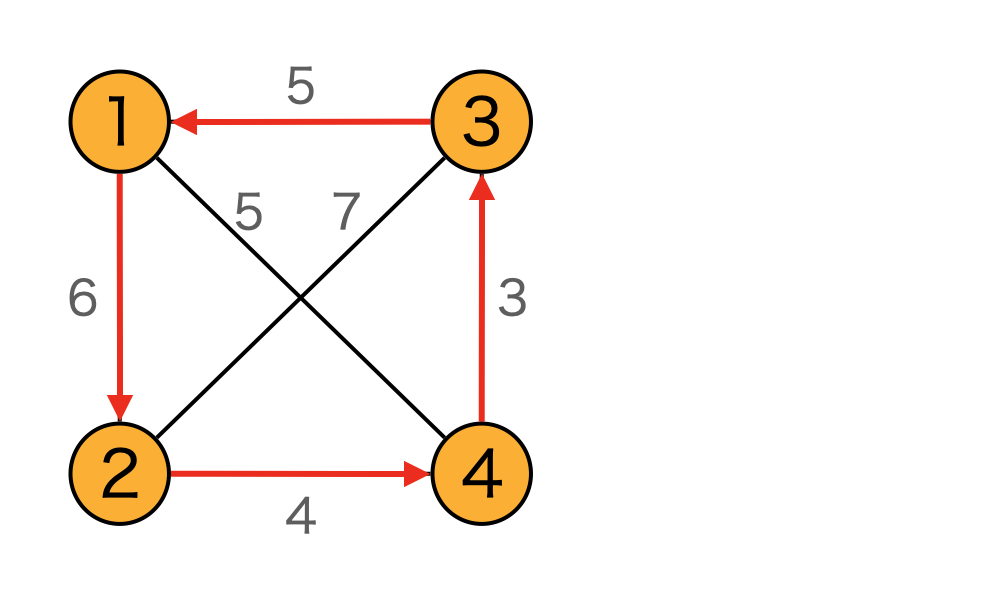
RUNS = 10./LKH test2.parで実行すると以下のresult.txtが出力されます。
NAME : test002.18.tour
COMMENT : Length = 18
COMMENT : Found by LKH-3 [Keld Helsgaun] Fri Dec 8 14:15:28 2023
TYPE : TOUR
DIMENSION : 4
TOUR_SECTION
1
2
4
3
-1
EOF結果を図に書き込むと以下のようになります。ちなみに、これは最短経路です。
「繋がってない経路は、どう表現するれば良いのか?」
繋がっていないパスは、すごく大きな値を設定してください。例えば1と2の経路がつながっていない場合には、1と2の距離を1000とか、10000とか十分大きな値にしておきます。
パラメータファイルにINITIAL_TOUR_FILEを設定することで、初期の巡回路を設定することができます。ツアーファイルのフォーマットは、OUTPUT_TOUR_FILEで出力されるファイルと同じフォーマットです。
例えば、以下のようになります。この例では1→2→4→3→1の順番で巡回することを指定しています。
TYPE : TOUR
DIMENSION : 4
TOUR_SECTION
1
2
4
3
-1
EOF初期の巡回路を設定した方が、収束が早くなったり、最適解に近づいたりします。ある程度効率のよいパスがあらかじめわかっているのであれば、設定しておいても良いです。
巡回セールスマンのソルバー、LKHについて解説しました。
このソルバーですが、kaggleのサンタコンペでお世話になっています。年に1回しか使わないので使い方含め毎回調べているので、ブログにまとめてみました。
ソルバーとしてはかなり優秀です。巡回セールスマンの近似解を求めたい場合に活用してみてくはどうでしょうか。